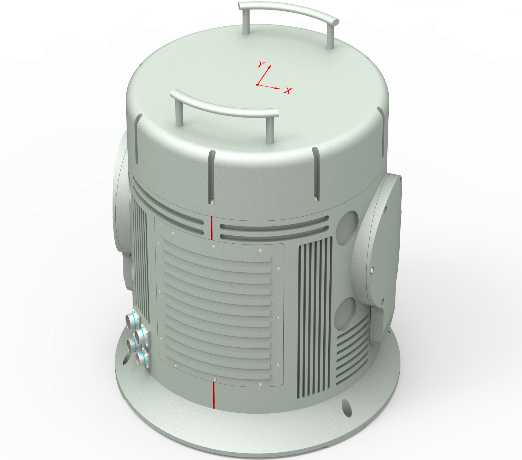
RLG Two-Axis Indexing Inertial Navigation System




Chigadzirwa tsananguro
RL2-90 Inertial Navigation System, yekucheka-kumucheto mhinduro yekunyatso famba.Yakashongedzerwa nerudzi rwe90 mhete laser gyroscope uye quartz inochinjika accelerometer, inopa chaiyo kumhanya, chinzvimbo, uye maitiro ruzivo.Inobatanidza zvisina musono neGNSS, altimeters, uye airspeed metres, zvichiita kuti ive yakakodzera kune vatakuri vemhepo nepasi.Zvingave mumatangi, mota dzehondo, ndege, drones, ngarava, kana njanji inomhanya-mhanya, iyi sisitimu inovimbisa kutonga kwakavimbika kwendege, kugadzikana kwemafungiro, uye chinzvimbo.Nekurongeka kwepamusoro mune ese ari maviri akachena inertial navigation uye akabatanidzwa ekufambisa modhi, iyo RL2-90 ishamwari yako yaunovimba nayo inovimbika uye chaiyo yekufamba mumashandisirwo akasiyana siyana.
PZVINHU ZVAKAITIKA
l Maviri-axis indexing maitiro ekuderedza kukanganisa
l Yakanyanya kurongeka mhete laser gyro uye quartz accelerometer
l Optional static kana kufambisa base yekuzvigadzirisa
l Kukanganisa paramita calibration uye muripo mune yakazara tembiricha renji
l Sarudzo dzakasiyana dzekuisa nzvimbo dzeGNSS/Odometer/DVL
l Configurable navigation modes
l Yakanakisa kukodzera kwezvakatipoteredza
l Mitemo yemauto
APPLICATION nharaunda
l Kufamba kwemotokari pasi pegungwa
l Positioning uye kuchamhembe-kutsvagira mota yenyika
l Kudzikamisa uye kutonga kwekufambisa mutakuri
l Kuyerwa kwemaitiro ekuda maapplication
MAIN FUNCTIONS
l Iine basa rekuburitsa ruzivo rwakadai semutakuri chinzvimbo, musoro, maitiro ekona, angular rate uye kumhanya munguva chaiyo;
l Iine maitiro ekushanda akadai seyakachena inertial navigation uye INS/GNSS (kusanganisira Beidou) yakabatanidzwa navigation;
l Iva nebasa rekugamuchira satellite yekufambisa ruzivo inopiwa neyekunze nguva system frequency standard midziyo;
l Iine basa rekugadzirisa pasi uye rinotsigira basa rekugadzirisa mhepo;
l Iine mabasa akadai sesimba-pa-self-test, periodic self-test, status report, installation error compensation, uye non-volatile storage.
PERFORMANCE INDICATORS
| Kururama kwehurongwa Kururama Kwehurongwa | Pure Inertial Navigation/Pure Inertial Navigation | 2.0nmile/5d, PEAK | |
| Integrated Navigation/Navigation neGNSS | ≤5m , 1σ | ||
| Heading angle/Heading | 0.01°, RMS | ||
| Horizontal maitiro (roll uye pitch) Horizontal Attitude (mupumburu & pitch) | 0.005°, RMS | ||
| Pure Inertial Velocity | 1.0 m/s , RMS | ||
| GNSS Integrated navigation Velocity | 0. 1 m/s , RMS | ||
| Zviratidzo zve inertial zvishandiso Gyro uye Accelerometer Parameters | laser gyroscope _ Gyroscope | Range/Range | ± 6 00 deg/s |
| Bias Kugadzikana | ≤0.002 deg/h, 1σ | ||
| Kusarura Kudzokorora | ≤0.002 deg/h, 1σ | ||
| Scale Factor isiri-mutsara | 1 ppm | ||
| Accelerometer Accelerometer | Range/Range | ± 15g | |
| Bias Kugadzikana | ≤10μg , 1σ | ||
| Zero bias repeatability Kusarura Kudzokorora | ≤10μg , 1σ | ||
| Scale Factor isiri-mutsara | 15 ppm | ||
| gadzirisa nguva Nguva Yekugadzirisa | Cold Start | ≤ 15 min | |
| Tangazve | ≤ 10 min | ||
| Mhepo/Mundege Kutanga | ≤15min | ||
| Maawa ekushanda Operation Nguva | Kuenderera mberi kwekushanda nguva / Kushanda Nguva | kupfuura 10h | |
| Interface Features interface | Supply voltage / Voltage | 18 ~ 36VDC | |
| Kushandisa Simba | ≤ 40W @ 24VDC | ||
| Electrical interface/Magetsi | RS232 × 2 RS422 × 3 ZVINOGONA × 2 Ethernet × 1 1pps × 1 | ||
| Data Update Rate (inogadziriswa) | 200Hz@115.2kbps | ||
| Shandisa zvakatipoteredza Environmental | Operating Temperature | -40°C~+65°C | |
| Kuchengetedza tembiricha/Kuchengetedza Temperature | -55°C~+85°C | ||
| Shandisa Altitude/Altitude | 20000m | ||
| Humidity | 95% (+25°C) | ||
| Vibration/Vibration | 5g @ 20 ~ 2000Hz | ||
| Kuvhunduka/Kuvhunduka | 40 g, 11 ms, 1/2 Sine | ||
| Zvinhu zvemuviri Zvenyama | Dimensions/ Saizi (Φ*H) | 540 x 536mm | |
| Huremu/ Huremu | 55 kg | ||
Cherechedza: Chimiro chinogona kugadziriswa maererano nezvinodiwa nemushandisi.